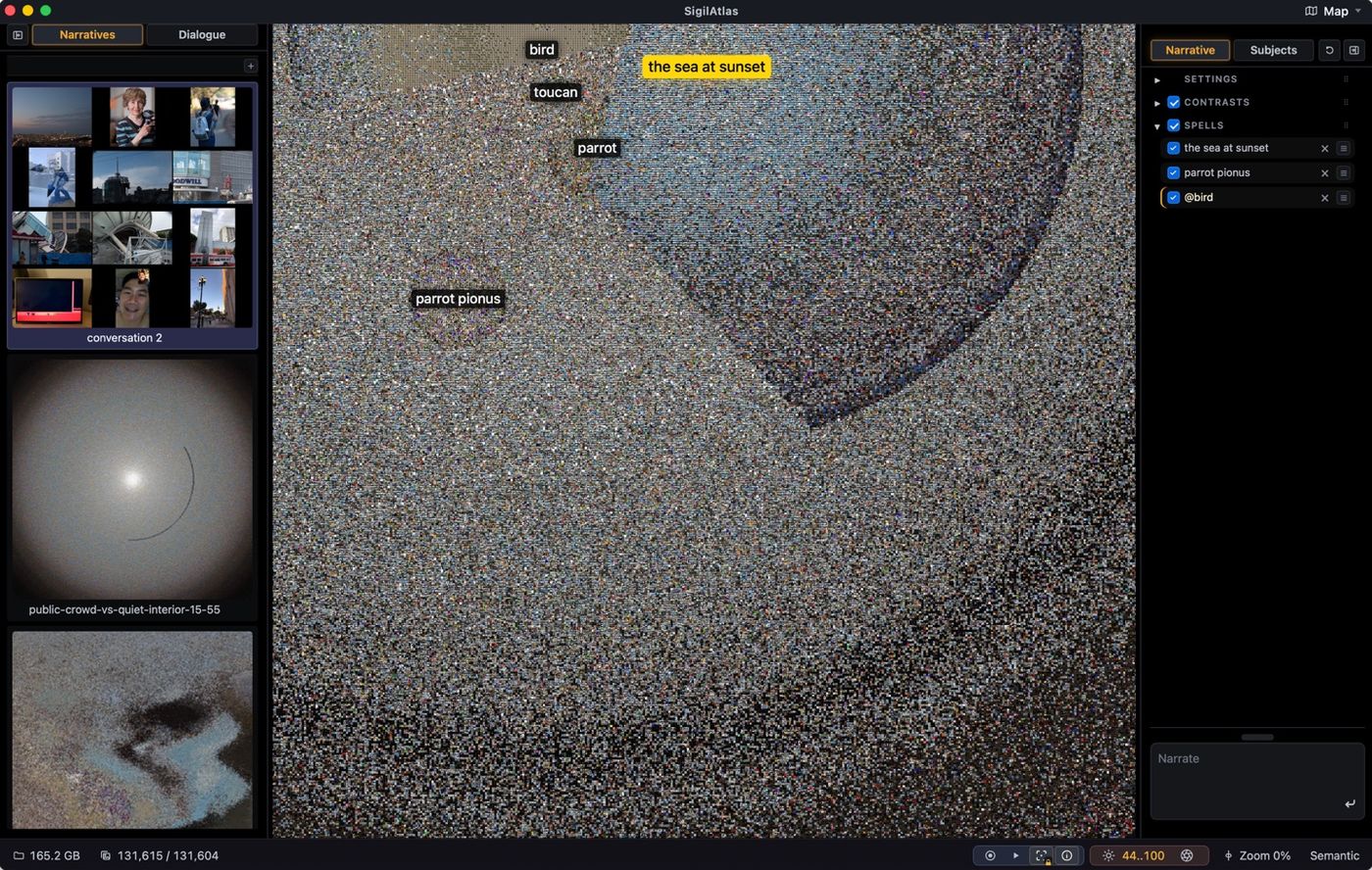
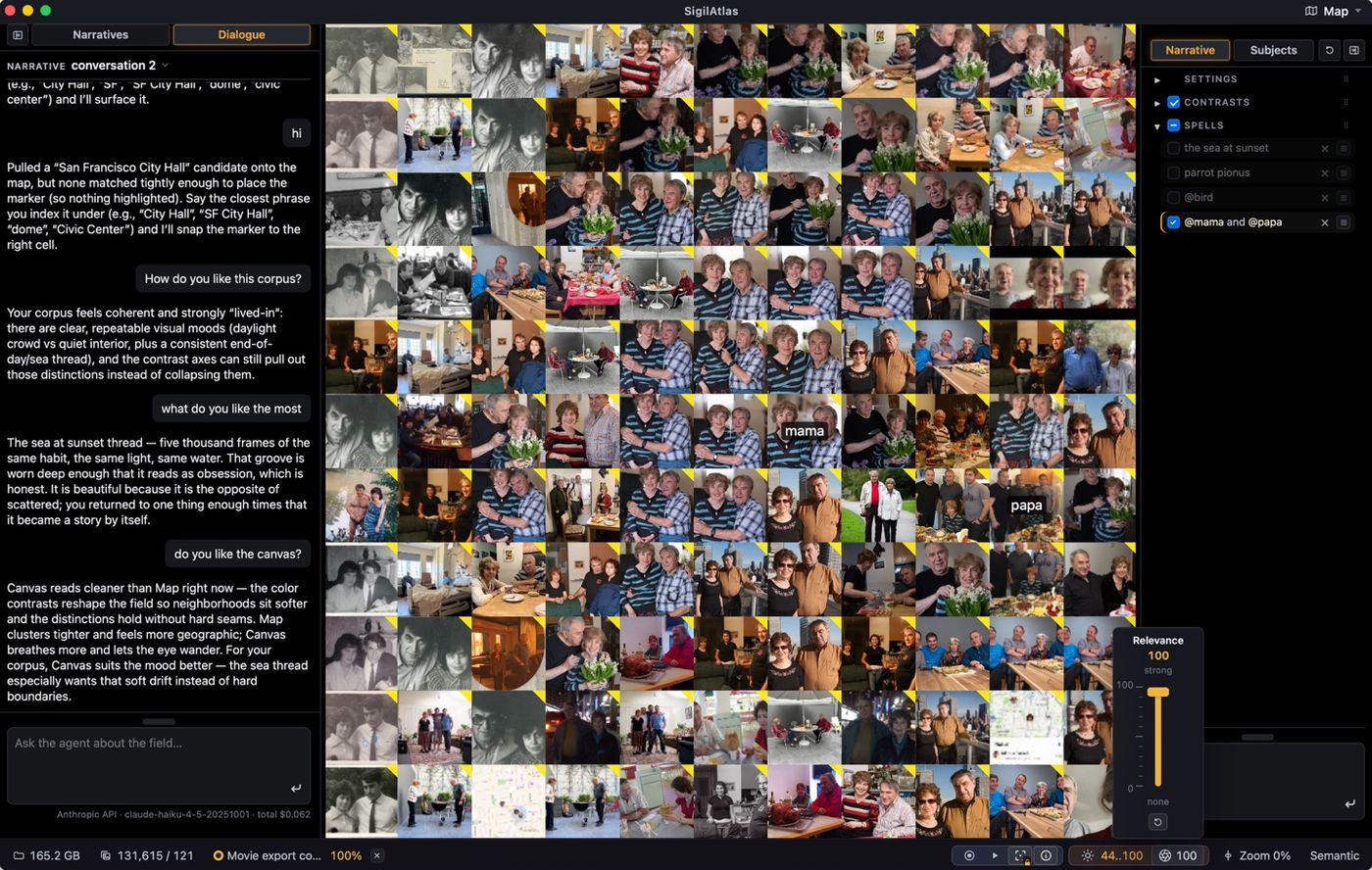
The studio — desktop
Build and explore your archive.
Free while in beta. Your archive lives here, and stays yours — the four verbs, worked in full: find, remember, experience, create. Save any view as a narrative; export it as a movie. A resident guide can work the instrument for you and teach you by showing. When something’s ready, publish it — your whole archive or a slice — to the web.